特斯拉Autopilot更新 新增“相邻车道速度调整”功
来源:未来汽车日报
作者:牛晓通
在尝试实现完全自动驾驶的道路上,特斯拉正以小步快跑的态势向埃隆·马斯克的目标迈进。
近日,特斯拉向车主推送了最新的2019.40.2系统更新,Autopilot功能进一步升级,新增“相邻车道速度调整”功能,支持汽车根据道路上其他车辆的速度调整自身速度。
 特斯拉更新说明来源:推特
特斯拉更新说明来源:推特
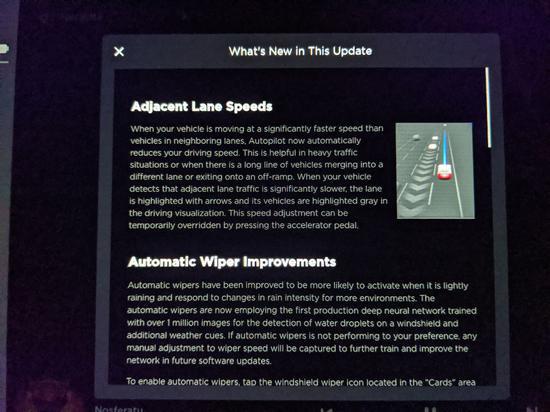
根据特斯拉的软件更新说明,该功能可以检测车辆行驶速度,当车辆速度明显快于相邻车道中的车辆时,Autopilot会自动降低车辆行驶速度。而当车辆被检测到比相邻车道汽车行驶速度明显变慢时,该车道将在导航地图中突出显示,车辆也会在导航屏幕中显示为灰色。
从更新说明可以看出,该项功能改进类似于交通感知巡航控制(TACC)功能的加强版。2014年,特斯拉的Autopilot系统增加了交通感知巡航控制(TACC)功能,可以根据前方车辆速度自动调整车速。如今在感知前方车速之外,新的Autopilot也可以根据相邻车道车辆速度进行车速调整。
今年4月,马斯克曾公开表示称,预计2020年第二季度推出完全自动驾驶汽车。随后,他又在10月的投资者电话会议中将时间表提前至年底,称最早有望在2019年底前向部分用户推送完整的自动驾驶功能。
如今年底将至,马斯克实现承诺的时间红线近在眼前,每项Autopilot功能迭代都可以视为向这一目标的推进。
目前,市面上主流车型配备的自动驾驶功能基本为L2级别,可实现自动加减速和转向操作的部分自动化驾驶。马斯克所谓的完全自动驾驶功能即L5级别自动驾驶,即完全不需要人工介入,可以适应任何驾驶场景的最高级别自动驾驶。关于L5级别自动驾驶商业化落地的时间,行业普遍认为基本还需要5到10年。
12月7日,美国一辆特斯拉在开启辅助自动驾驶的情况下与一辆警车追尾,有关特斯拉自动驾驶功能安全性的问题再次成为舆论焦点。尽管自动驾驶安全性仍存在很大争议,但马斯克对于实现完全自动驾驶的目标没有改变。
