1万枚“硬币”拼成电子皮肤!能感受人类抚摸
智东西(公众号:zhidxcom)编 | 储信仪
导语:机器人也可以拥有全身触觉了!德国科学家通过对人体触觉的研究开发新型电子皮肤,该技术有望用于传感衣。
智东西5月19日消息,德国慕尼黑工业大学的研究人员最近开发了一种电子皮肤,可以帮助机器人感受人类的触觉。在MDIT的《传感器》杂志论文中描述的这款电子皮肤,与其他现有电子皮肤相比,所需的算力要低得多,因此可以以更大面积应用于机器人的身体。
触摸感使我们能够感到更安全,交互和控制与周围环境的联系时更便捷。许多技术系统和应用程序可以从类似的技术中受益。然而,尽管目前电子皮肤系统的覆盖范围已比以往更广,但大面积实现电子皮肤的案例仍然很少。
论文中表示,电子皮肤的升级面临新的难题:感测点之间的空间关系非常复杂,而在其中处理大量的异构触觉信息则成为了一个很大的挑战。研究人员针对这一挑战提出了一种新方法,以在用于大型电子皮肤的标准计算机系统上,实现灵活的事件驱动信息处理系统,并详细描述了事件生成器和解码器的有效设计。
用于电子皮肤系统的最终系统设计具有可伸缩性、高效性、灵活性,并且能够在无需定制硬件的情况下处理大量信息。该系统提供了例如在机器人技术中应用复杂的大面积触觉系统的可行性。
一、2欧元硬币大小的六边形传感器构成电子皮肤进行这项研究的研究人员之一Florian Bergne表示:“开发电子皮肤的主要动机源于自然,并且集中在我们人类如何与周围环境互动的问题上。虽然人类主要依赖视觉,但一旦涉及互动,我们的触觉就显得尤为重要。我们相信,赋予机器人触觉可以扩大机器人与人之间互动的范围,从而使机器人更具协作性、安全性和有效性。”
Bergner和以Gordon Cheng教授为首的其他研究人员开发电子皮肤已有大约10年的时间。最初,他们试图实现具有类似于人类皮肤的多模态感知功能的电子皮肤系统。换句话说,他们试图创造一种能够感知轻触、压力、温度和振动的人造皮肤,同时有效地将其感知分布在触觉交互发生的不同位置。
Bergner说:“人类不仅可以分辨不同种类物品的触感,而且可以分辨它们的位置。除了复制此功能外,电子皮肤系统还应承受物理接触的压力,具有可伸缩性,并以最小的动力将各种功能综合在一起。”
Bergner及其同事开发的新型电子皮肤系统由六边形的传感模块组成。每个模块大约是2欧元硬币大小。当它们连接在一起时,就形成了柔软的人造皮肤或皮肤补丁,可以附着在各种各样的平面或曲面上。
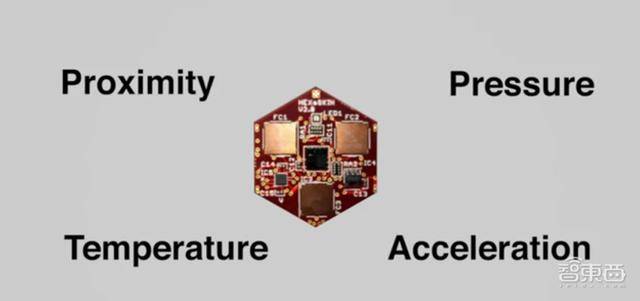
▲大约2欧元硬币大小的六边形传感模块
二、睡眠模式降低系统运行对算力的需求到目前为止,可以应用于大面积表面的电子皮肤,在它们一次可以检测到的触摸信息量方面仍存在明显局限性。另一方面,Bergner和他的同事开发的电子皮肤系统在保留了其先进的感应功能的前提下,而无需耗费大量的算力来进行。
Bergner说:“传统的信息处理对计算能力,高功耗,高信息传输速率,信息丢失和延迟的要求高得令人无法接受。另一方面,人类则可以毫不费力地处理大约500万个皮肤感受器收集到的触觉信息。在最近的研究中,我们问自己,人类的触觉是如何做到这一点的?我们如何利用研究发现神经科学来减轻我们开发的电子皮肤的局限性?”
人类皮肤上的接受器在检测到触摸压力、温度或振动的变化之前,往往会保持不活动的状态,而不是不断向大脑发送信息。当它们检测到变化时,这些接受器就会触发刺突,将该变化通过神经纤维传递给大脑。
这一过程的结果是,人类通过皮肤向大脑提供了与触摸有关的新信息。Bergner和他的同事对该生物过程进行了深入研究,并试图将其过程复制到他们的电子皮肤中。
Bergner解释说:“在我们的系统中,每个人造皮肤细胞都在监视其传感器,以检测变化。当他们检测到足够大的变化时,皮肤细胞就会向计算机报告新信息,否则它们就会进入睡眠模式。该操作大大降低了系统运行对算力的需求。”
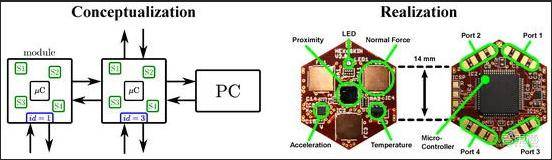
▲电子皮肤系统的皮肤细胞形成图示
每个传感器模块或皮肤单元都使用不同的传感器(例如S1,……,S4)和一个微控制器(μC)的处理能力;这些模块相互连接,形成模块网络,并在每个模块与信息处理系统(例如计算机)之间提供双向通信路径,以构成该电子皮肤系统的一个皮肤细胞。
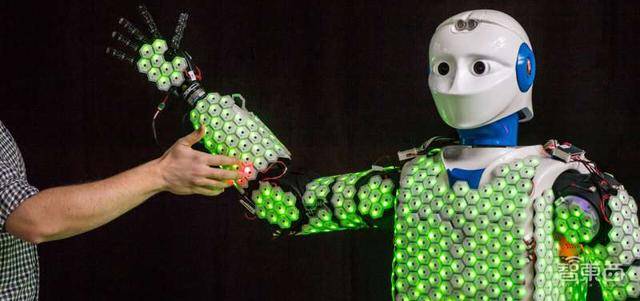
三、用超1万块传感器覆盖机器人,减少80%计算量Bergner和同事们成功将他们电子皮肤应用于一个人类大小的机器人——H1身上。该系统能够使用1260个皮肤细胞覆盖整个身体,其中包括超10000个传感器,这是以前从未做过的。
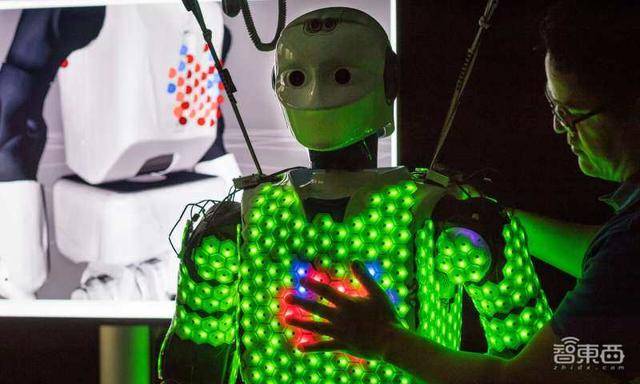
▲研究人员开发的H1机器人身着电子皮肤
Bergner说:“H1机器人只能通过机载系统进行自动操作。只有借助我们以新形式驱动的电子皮肤的优势,用皮肤细胞覆盖H1才成为可能。该电子皮肤减少了大约80%的计算量。更传统的电子皮肤会使H1系统完全饱和,从而导致延迟,以及大约25%的连续信息丢失的状况发生。”
在未来,高效的电子皮肤可以为各种机器人提供更强大的触摸功能。此类电子皮肤可以增加人机交互的安全性,这在工业和医疗领域的价值尤为突出。除此之外,电子皮肤细胞还可以用于开发新的技术工具,例如触敏式义肢、智能物体或传感衣。
Bergner说:“在解决了处理大面积电子皮肤的触觉信息的难题之后,我们现在可以考虑缩小皮肤细胞的尺寸,从而达到更高的感应密度。H1披上了大面积的电子皮肤,我们可以用它来研究人机交互和全身控制。另一个有趣的研究方向可能是研究以新形式驱动的触觉信息,用来增强感知和控制算法。”
论文链接:https://www.mdpi.com/1424-8220/20/7/1965/htm
结语:机器人触觉异军突起,电子皮肤将有望用于更多行业研究人员通过对人体触觉系统的研究开发出了节省算力,且可应用于机器人全身的高效电子皮肤。此类电子皮肤更强大的功能增强了人机交互的安全性和便捷性。
以往的机器人技术普遍将目光对准机器人视觉、听觉、避障等能力,而该电子皮肤将注意力转向机器人触觉,从新领域推进机器人在更多方面发挥作用。
可全身覆盖的电子皮肤不仅可应用于工业及医疗领域,它以其独特的低消耗高敏感度的特征,有望应用于更多行业,为其他困难事件的解决提供更便捷的方式。
消息来源:Tech Xplore
责任编辑:
