机器人狂欢、AI预测厄尔尼诺、后浪可畏:2020W
机器之心报道
机器之心编辑部
16支团队收获佳绩,每个赛道精彩各异。
2020年7月8日-11日,由张江集团、优必选科技、软银集团旗下软银机器人、Watson Build 创新中心、机器之心联合组织的世界人工智能大会黑客松,首次以远程和小规模线下结合的方式举办,作为大会期间唯一一场黑客松大赛,以别开生面的竞赛形式和赛题吸引了来自全球顶级开发者同台竞技。经过三天不舍昼夜激烈的角逐,三大赛道优胜团队终于出炉并在WAIC开发者日主单元上进行了颁奖,比赛共计16支团队收获佳绩,最小年龄获奖者为高一学生。

软银机器人集团首席商务官Sakata Dai
在开发者日主单元上,远在日本的软银机器人集团首席商务官—Sakata Dai先生因疫情不能抵达现场,特别通过视频向获奖选手送来了祝福。
在颁奖现场,软银机器人中国总经理邱靓女士为特等奖和一等奖选手颁奖,软银机器人中国销售总监符裔先生为二三等奖及AI+机器人未来英才奖获奖选手颁奖。

软银机器人赛道颁奖环节
IBM 数字化平台和开发者生态总监倪鑫、六七八九集团COO,张江跨国企业联合孵化平台总经理吴家康为 IBM Watson Build CallForCode 赛道获奖团队颁发了奖励。

Watson Build赛道颁奖环节
为了鼓励更多队伍能够充分参与人形机器人开发,优必选科技的Walker仿真挑战赛采用了远程线上形式,吸引了全球34支顶级开发者队伍踊跃参与。在颁奖典礼上,优必选科技CTO熊友军也在深圳给Walker赛道获奖选手送上了祝福。

优必选赛道颁奖环节

优必选科技CTO熊友军祝福获奖选手
因文章较长,可点击以下超链接直达三道赛题的详细报道:
优必选科技Walker仿真挑战赛:走进未来,研发共创
软银机器人 Pepper 再度来袭:后浪可畏
IBM call for code :放眼地球,心存高远
优必选科技Walker仿真挑战赛:走进未来,研发共创
基于“让智能机器人走进千家万户”这一使命,2015年,优必选科技正式立项开始研发大型仿人服务机器人。2019年Walker机器人与美国波士顿动力的Atlas、AgilityRobotics的Cassie、日本丰田的T-HR3s、本田的E2-DR共同入选“值得关注5大人形机器人”。

优必选科技Walker机器人
本次比赛优必选科技首开Walker核心模型及相关数据,面向全球开放报名,可谓人形机器人界的一大创举,同时大大降低了大型仿人服务机器人的研发门槛。
在赛题的设置上,也是颇具用心,以智慧家庭为主题,6大场景15项任务难度递进,全面考察选手运动控制、导航及视觉等多项人工智能及机器人技术的综合运用。考虑到比赛周期较短,主办方在赛题的难度分级上进行了充分考虑,使得参赛队伍可以尽快的上手平台的使用,完成一些初级的任务,同时富有余力的队伍可以尝试特别设置的挑战任务,解决人形机器人在真实世界中遇到的技术难点。

附赛题介绍图
具体到比赛任务来说,把Walker机器人放到实际场景中运行,本质是要去解决三个方面的议题,即“我在哪里”、“我要干什么”、“我怎么干”,这三大议题就归结到本次赛题所考察的的三大关键技术——定位导航、视觉、运动控制。
导航技术通过激光雷达、里程计、摄像头、IMU等传感器获取环境和自身信息,建立环境地图,确定机器人在环境中的位置,通过路径规划移动到目标点。针对人形机器人,视觉导航能够提供更广泛的颜色、特征点、深度图等环境信息,是未来导航的主要发展方向。本次比赛中,优必选科技开放了Walker头部,胸部和腰部的多处摄像头数据,主要考察参赛队伍开发视觉导航相关算法,完成机器人自主行走到任务点执行任务场景的能力。
视觉技术通过机器人上的摄像头获取到的数据,进行图像处理、模式识别和图像理解,对目标物体进行监测、识别、跟踪等处理,让机器人能够观察和理解环境。Walker具备多个可以提供不同维度信息的摄像头,为参赛队伍充分利用周边环境来获取执行任务所需的反馈信息提供了可行性。比赛中优必选科技设置了机器人随机出现在任务点附近的方式,机器人通过视觉相关算法,定位到所需操作的物体,通过手眼协调操作完成任务。
运动控制技术通过综合力觉、视觉、IMU等信息,按照一定的系统模型和期望,协调控制多个伺服关节按照期望的方式一起运动,使得机器人可以稳定地运动起来并完成对物理环境的改变。Walker具备7自由度的冗余机械臂和6自由度的足式腿,可以灵活地适应人类家居环境,完成稳定的行走移动和灵巧的抓取操作。
具体来说,在抓饮料罐场景下,涉及导航、视觉与控制三个技术方向,是综合应用场景。该场景中,参赛选手需要依据VSLAM技术对机器人定位,利用已知机器人位姿与地图,规划机器人走到任务点;采用视觉方案识别指定饮料罐及其位姿,控制机器人走到合适的位置,使水杯在机器人手臂的可达空间范围内;最后,采用手臂规划与视觉伺服控制手掌到达指定的位姿,并抓取饮料罐。
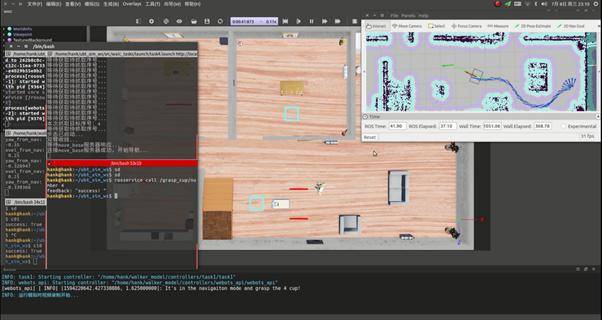
图为比赛中采用VSLAM规划机器人路径

图为比赛中采用视觉伺服方案抓取水杯
在这个任务中,WalkerUp!队伍在完成该任务中比较突出,在短短一个月的时间内,充分利用现有资源做为基础框架,如orb-slam2,分析双目相机与RGBD深度相机在该框架下的优势,提出改进方案。Walker的手臂具有七个自由度,而且肘部带有偏置,常规的基于臂形角的七自由度机械臂求解方法在 Walker上并不能直接应用。Critical HIT队采用将其中一个关节固定,将该问题转换为求解六自由度机械臂逆解,采取该种方案能够有效的降低求解的难度,然后通过遍历的方案获取合理的解,该种思路有效的提升解决问题的效率。
在开冰箱场景中,同样涉及导航、视觉与控制三个技术方向,是综合应用场景。该场景下,同样需要参赛选手们对机器人定位与导航,并控制机器人走到合适的位置;然后,采用视觉方案,识别出冰箱的门把手及其位姿,并选取合适的抓取位姿;最后,采用全身运动规划、步态规划、末端稳定控制及柔顺控制等方案实现打开冰箱门。
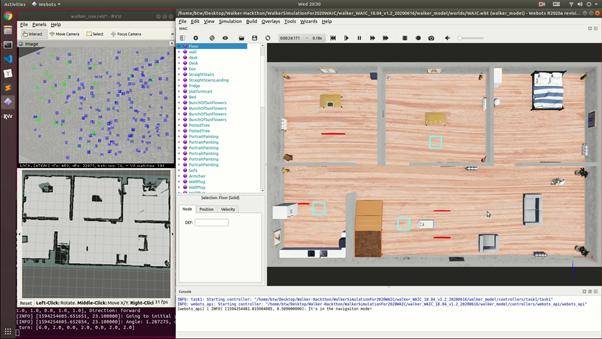
图为比赛中视觉导航全局路径规划

在该任务中,TheWalkingDead队伍在导航中最大的特点是依据全局地图设置关键帧,并开发了一个支持以全局位置,姿态作为输入的步伐规划库,这使得开发基于关键帧的路径规划算法变得轻松。TheWalkingDead在开冰箱门时,规划手掌位姿抓取冰箱门把手,依据腿部运动补偿腰部浮动基座运动,确保末端位姿的稳定,我们看到机器人抓冰箱门的手始终没有离开门把手。在机器人边走边拉开冰箱门的过程中,最难的是机器人手掌规划的轨迹很难与门打开时门把手的运动轨迹重合,TheWalkingDead采用力控方案,有效的避免了机器人与冰箱之间产生内力,提升了机器人在拉冰箱行走时的稳定性,给人一种踏实稳健的感觉。
在搬箱子场景中,任务分为搬起箱子与搬着箱子后退到红线外两部分。该任务主要考察选手的规划与控制能力,需要选手们自行设计步态算法与平衡控制器,确保机器人在搬起箱子与行走时的稳定性。
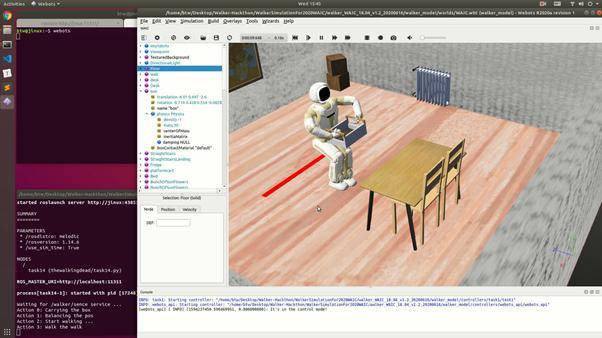
图为比赛中搬箱子后退行走
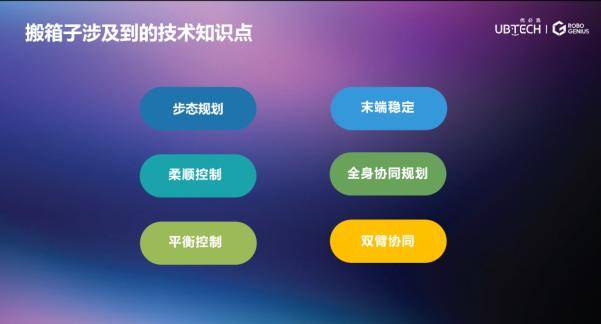
在该任务中,冠军队伍TheWalkingDead表现依然出色,非常稳定的搬起了箱子并后退到红线以外。TheWalkingDead采用LIP模型进行步态规划,实现了Walker的稳定行走。在该任务中搬起箱子并保证Walker的稳定是最难的,TheWalkingDead非常巧妙的在搬箱子的同时质心往后移动,保证了箱子在离开桌面时的稳定性;同时优化行走步态算法,保证机器人在搬箱子时依然健步如飞。
具体比赛中的研发细分场景还有很多,有队伍表示:“一个爬楼梯,我连续写了3个17小时”,可见本次赛题任务真的不简单,同时也说明了大型仿人服务机器人的研发难度。
除了选手精彩的研发任务比拼以外,值得一提的是,也正因为比赛为线上形式,招募队伍覆盖全球,决赛八强来自耶鲁大学、密歇根州立大学、华中科技大学、香港中文大学、哈尔滨工业大学(深圳)、南方科技大学等世界知名高校,赛题任务完成度也很高。这也与优必选科技在人工智能&机器人高校教育领域的多年布局密不可分。

图为优必选科技决赛八强
优必选科技高校教育事业部总经理齐建伟表示:“这只是一个开始, Walker仿真平台作为一个赛项在全球范围内的公开亮相代表了我们助力高校教育的决心。我们会继续为老师和同学们提供更好的机器人科研和教学平台,助力高校在人工智能与机器人领域的发展。”
软银机器人 Pepper 再度来袭:后浪可畏
身高1.2米的人形机器人Pepper,是由软银集团旗下的软银机器人公司推出的商用服务和教育机器人。Pepper 是一个可编程开发平台,有不同操作系统版本和开发工具,适用于不同层级的开发者,开发者可结合自身情况和场景需求对机器人进行定制开发。
其实本次比赛的多数队伍是第一次接触Pepper,之前没有服务机器人相关开发经验,甚至安卓开发经验也并不丰富,但他们在软银机器人易用的开发工具和丰富的在线培训视频和文档的支持下,大多数队伍均能快速掌握Pepper的基本交互操作编程,并且都初步开发出了适用于不同场景的有落地价值的应用,这也符合本赛题的初衷:开发者的作品需要实用、有趣,让机器人更好地服务于人。
与优必选、IBM相比,本赛道最大亮点在于,来自浙江师范大学附属中学的四名高一学生摘得 “AI+机器人未来英才”奖,即将实现赴软银机器人中国三周学习交流的愿望。
疫情期间,Pepper 走进了中国、意大利、澳大利亚、西班牙、日本等多个国家的多家医院,承担迎宾接待、排队管理、辅助诊断、娱乐陪护、用药提醒等工作。受此启发,浙江师范大学附属中学团队针对疫情防控需求,就人脸识别(性别识别+口罩检测)、健康码识别和体温检测三个方面进行了开发。
在团队看来,目前人工检测和排查的方案存在人员成本高、人员安全隐患和疲劳导致误差等弊端,团队设计出机器人替代方案,尝试挖掘Pepper的潜在优势。比如,除了基本防控措施,机器人还会 问候互动、多媒体播放,Pepper可以凭借这些优势,让疫情防控工作更加人性化和有趣。

“AI+机器人未来英才”奖团队,浙江师范大学附属中学选手答辩情景
不过,最别出心裁的应用来自特等奖团队的“脑洞”。张江的企业——上海刻契网络科技有限公司根据数字孪生的概念,给Pepper建立了一个3D的虚拟影子,在操作虚拟影子的过程中,真实 Pepper也会完成一样的行为,犹如陪伴在侧的工程师机器人。

特等奖团队上海刻契网络科技有限公司的选手答辩情景
团队认为,在智能制造场景下(比如智能仓储、光伏和汽车电子产业等),人类会因为误差给产线来带损失,人机协同能力比较低,指挥传达能力也比较低,因此,可以应用Pepper数字纽带的数据仓库集成数据,物理现实和虚拟空间的数据关联分析能力,为高端制造业技术人员提供替代方案与工程师伙伴的角色。
一等奖获得者广东东逸湾科技有限公司的团队打造出“企业定制化智能小秘书”。
由于公司主营业务是做展厅引流,所以,团队第一时间想到了要结合Pepper人形的特点和语音导览的功能,一开始的选题只是想做前台接待、会议暖场的机器人,但在和软银机器人沟通之后,他们发现这种类型的机器人其实大家都能去实现,所以想挖掘出更深层次的商业价值,进而触发办公场景智能秘书的想法。
在他们的设计方案中,Pepper 秘书可以负责迎来送往、对商业秘密更能守口如瓶、信息传达比人类秘书更准确并可随时播报最新信息、甚至可以像法庭书记员一样,随时记录会议,等等。

一等奖团队广东东逸湾科技有限公司的选手答辩情景
作为初次参赛的优胜团队,虽然先前有一定的安卓开发经验,但在短时间内能够把项目的主要功能实现整合,依然让东逸湾成员感觉很有成就感。当然,获奖后有机会去软银机器人日本总部参观,也让团队很兴奋。
获得第二名的工博士科技股份有限公司,此次展示的是故事汇机器人,应用于展厅,除了讲故事之外,Pepper还可通过语音/触屏交互实现故事分叉功能。值得一提的是,工博士最初专注于工业机器人,提供智能工厂解决方案,此次接触Pepper,希望今后有机会向客户提供更多元化的智能解决方案。

二等奖团队工博士科技股份有限公司的选手答辩情景
而第三名获奖者上海电机学院通过让机器人学会玩石头剪刀布,更灵活地与商场客户交流并派发优惠券的设计方案,充分发挥了Pepper作为人形机器人的优势,用于增强与人互动,帮助商家招徕顾客。

三等奖团队上海电机学院的选手答辩情景
在总结环节,软银机器人评委给参赛者们提了一个建议,希望选手今后多从业务角度出发,在项目方案中增加机会概率多大、可以降本多少之类的具体数字,这样有助于全面评估作品的可行性。
IBM call for code :放眼地球,心存高远
IBM Watson Build 创新中心 “用技术改变世界 Call For Code 全球挑战赛”同样竞争激烈,参赛者的视野也从聚焦具体产业,上升到地球环境。
随着全球人口的不断增长, 地球所承担的资源压力也越来越重。研究显示,到 2100 年左右,全球气温可能会升高 3-5 摄氏度。大量研究证实,气候在不断变化,海平面迅速上升,极端天气事件在世界范围内不断上演。
与此同时,人们与混沌系统、蝴蝶效应的较量能力也在进化。比如,借助机器学习算法,人们越来越善于预测百公里厚、并且一直在移动的大气层运动,并根据最新数据不断调校模型算法。最明显的例子,就是人们对飓风马修的运动轨迹越来越了解。现在,提前5天的预测,就像十年前提前24小时预测一样准确。
因此,IBM Watson Build 创新中心以「应对气候变化」为主题,设置了「水资源可持续性」、「能源可持续性」、「抗灾能力」三大方向。从获奖情况来看,大家仍然遵循着既有的两大思路来设计自身方案:利用“对话”API搭建对话机器人,从事沟通与协调;或者,注重“发现”,让人工智能加速从海量非结构数据中提取信息。
冠军团队名叫“喵喵喵”,阵容强大,成员包括字节跳动设计师、北航博士研究生、海归程序员和Airbnb工程师。他们利用机器学习技术结合卫星数据来预测厄尔尼诺现象,通过观察海平面高度的异常情况并使用ConvLSTM2D 神经网络加以识别和预测来更好的帮助人类抵抗自然灾害。
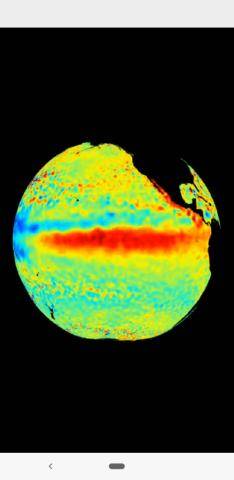
冠军团队还有自己的React App,https://rootial.github.io/
这一解决方案不仅让人想起几年前,IBM收购了 Weather Company。作为一家能够从 4000 万手机中收集超过每秒 4GB 信息量, 以及147000 个天气监测站,50000 个航班,和数不清的能够反馈天气数据的智能汽车作为信息收集源的公司。它掌握的天气数据就是对未来天气进行预测分析的最好素材。
天气数据几乎影响着各行各业,IBM 可以向各个产业出售天气数据和业务解决方案,而Watson则是这一构想的核心所在:
如果能预测很多事情,能够预测地更准确,我们就能采取行动。即便是今天,我们能够提前3,到4周预测天气,我们可以理解严寒天气延长意味着什么,天气转暖和干旱又意味着什么,所有这些,都有助于水资源、农业生产甚至更多行业的生产和生活。
第二名花落“大气科学小分队”。他们试图构建一个气候影响评级(CIR)系统,该CIR系统的核心功能为扫描产品barcode(和食品标签类似),能够实时在数据库中调用产品评级数据,通过预设算法给出产品气候评级结果,让消费者意识到制造过程中的能源成本和由此产生的二氧化碳(以及诸如水之类的其他消耗品)。
本团队在此次比赛中完成了基础框架的建立和实现,并对系统完善升级提出了拓展框架的构想。基础框架部分包括CIR评级标签设计,评级指标的算法建立,通过API服务器、cloudant等服务调用和存储数据,评级结果可视化的实现。拓展框架部分除了核心算法外,还包括制造商和销售商上载数据平台的搭建,政府部门基于CIR评级结果的补贴政策的制定等。
如果说前两名获奖团队侧重 Watson “发现”技能,那么,第三名获奖者将重心放在 “对话”。这也是非常常见的构建思路,以往IBM Watson 挑战赛中也经常看到这类方案,比如虚拟旅行助理、导医机器人等。
第三名是章明为代表的“We Help”团队,打造了语音无线警告系统。他们公司本来就是做音视频交互协议,因此,他们想要结合IBM的人工智能技术,去扩大它的语音应用场景。

WeHelp的方案展示
比如,当前端设备监听到关键声音(如救命,今后还可以更多,玻璃碎,大哭,枪声等)后,可以直接接通应急救援频道,可以是多方并发接通,让更多的人收到报警来进行救援和协调。团队希望将 WeHelp的适用范围扩大到包括老人、小孩的求救,还包括公安、应急等面向社会安全场景。
章明认为,将来单一技术很难获得大量应用,混合技术一定是方向,WeHelp 希望更好的支持混合应用,在紧急救援中结合现场的声音求救,物联探测,AI探测等获得综合感知和救援能力,并利用 WeHelp 的语音和视频传输构建人和物联和智能桥梁。
责任编辑:
