“握住,很棒,向自己的嘴巴移动,再往回一些,好差不多,停!”随着张先生吸溜一口可乐,浙大二院神经外科病房内响起了一片掌声。

如此简单的一个动作,大家为何要为他喝彩?
喝一口可乐
历史性的突破
“太不容易了!对四肢完全瘫痪的人来说,这是不可能完成的任务。今天,通过脑机接口,他做到了!”浙大二院神经外科主任张建民激动地说。

浙大校长吴朝晖、浙大医药学部主任段树民视察脑机接口项目,并与张先生用意念控制的机械手握手
在2012年动物实验、2014年人脑初步实验的基础上,日前,浙大二院张建民教授团队与浙江大学求是高等研究院郑筱祥教授、王跃明教授团队在“植入式脑机接口临床转化应用研究”上取得了重要的阶段性成果。
在科幻电影里,人类对脑机接口赋予了丰富的想象和极大的期待。通过意念控制阿凡达,让原本双腿瘫痪的自己,在另一个世界里实现自由奔跑;穿上身心合一的盔甲,变身超级英雄“钢铁侠”,在天地间纵横飞跃、拯救世界……而今,从浙大二院神经外科病房内发生的这一幕,我们鲜明感受到,阿凡达、钢铁侠的梦想已越来越近。
4个月训练
72岁高位截瘫患者“动”了起来

接受此次脑机接口临床转化研究的志愿者张先生,是一位72岁高龄的退休教师、某中学校长。本应在退休后安享晚年的他,却在两年前因一场意外车祸,导致颈髓重度损伤,成了一名高位截瘫患者。
然而,他大脑功能尚健全,意识清楚。四肢无法活动的现状,给他的生活带去了无尽的阴暗与痛苦。但他并未因此消沉,而是始终怀着一份心愿,希望借助现代医学新技术,帮助像他这样的人群,在运动功能上有所改变,提高生活质量。
半年前,张先生的家人从新闻报道等渠道了解到,浙江大学脑机接口团队在利用植入式脑机接口技术帮助患者重建运动功能方面卓有成效,便主动联系到了张建民教授团队,并于2019年6月29日入住浙大二院病房。
2019年8月,在做好充分准备后,研究方案经医院伦理委员会批准,并征得张先生和家属的知情同意及签字后正式启动。8月底精准定位下顺利完成了国内首例开颅,将Utah阵列电极植入到控制右侧上肢运动的运动神经皮层的手术。由此,张先生开始了用意念与机械臂“对话”的生活。

用意念吃到油条
每天,张先生结束午休后,就会开始一天的训练。从开始的电脑屏幕上操控鼠标运动到后期控制机械臂三维运动。花样不断翻新,难度不断增加,效果不断提高。我们在近期的训练中看到,工作人员把一个盛着油条的杯子,放在机械手的旁边,张先生用“意念”让机械手对准位置,张开手指,握住杯子,一步一步往嘴边挪。挪的过程不算顺畅,有时往左偏一点,有时往右偏一点,张先生得“使劲”想着“往右”或“往左”,调整机械臂的方向。经过近半分钟的努力,机械手终于把杯子挪到嘴边,张先生吃到了油条。
抓、握、移,这些对常人来说再简单不过的动作,背后却是信号发送、传输和解码等一系列复杂的过程。因此,这种“转念”对像张先生这样脊髓神经损伤、运动功能丧失的残障人士而言,如果没有“脑机接口”,是不可能完成的任务。
手术机器人植入、个性化算法
更能读懂老年人的心思
在国际上已被报道的植入式脑机接口患者,均为中青年人。他们在体力、注意力、情绪配合等方面,也相对更稳健,而老年人则相对较弱。面对72岁高龄的张先生,国际上尚无先例可循,团队所要探索的显然更多,测试难度也更大。
第一道关卡
如何在尽量减少损伤的情况下,将微电极准确无误地植入患者大脑所在功能区,是此次研究的第一道关卡。
张建民说,大脑运动皮层神经元共分为6层,实验需要将电极植入到第5层的位置。这个过程中,电极植入不能有毫厘之差。植入位置太浅或太深,都达不到效果,还会损伤其他神经,“这对我们来说,是全新的手术,难度非常大”。
传统人工植入手术,精确程度没法达到最佳状态。张建民团队利用步进为0.1毫米的手术机器人,准确地将两个微电极阵列送入既定位置,误差仅在0.5毫米以内。这也是全球首例成功利用手术机器人辅助方式完成的电极植入手术。

张建民教授团队为张先生手术
术后复查确认电极植入位置无误
关键一步
接下来的关键一步,就是如何实现“意念操控”。脑机接口,不仅依赖材料科学、计算机科学等机器相关技术,更需要被试者的高度配合与规范化训练。
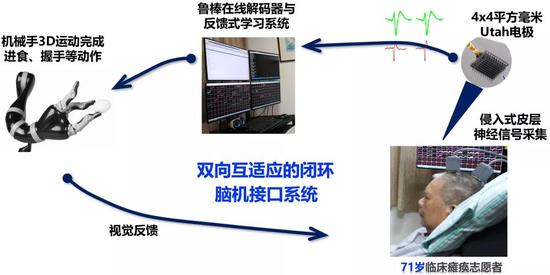
“在4毫米×4毫米大小的微电极阵列上有100个电极针脚,每一个针脚都可能检测到1个甚至多个神经元细胞放电。电极的另一头连接着计算机,可以实时记录大脑发出的神经信号。”浙江大学王跃明教授说。
不过,神经信号收集的成效,却与个体息息相关。
在国际上已被报道的植入式脑机接口患者,均为中青年人。他们在体力、注意力、情绪配合等方面,也相对更稳健,而老年人则相对较弱。面对72岁高龄的张先生,国际上尚无先例可循,团队所要探索的显然更多,测试难度也更大。
如何把收集的神经信号,准确地转化成机械臂的动作指令,既依赖于机器算法的设计,也会受到试验者个体脑电信号特征的影响。

目前,全球尚无统一标准化的信号采集、解码等分析手段。一开始,团队采用国外的几套线性算法,但效果都不太好。后来,团队引入非线性、神经网络算法,设计了一套针对这位高龄患者的个性化解决方案。
“相对于中青年患者,老年患者的脑电信号质量与稳定性都要差些,我们设计的非线性解码器,更能‘读懂’老年人的心思,帮助患者更好地学习操控机械臂、机械手。”张建民说。
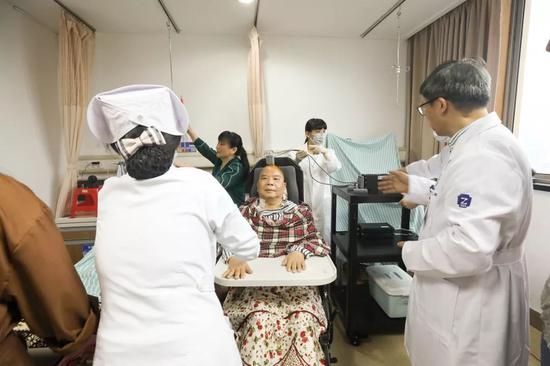
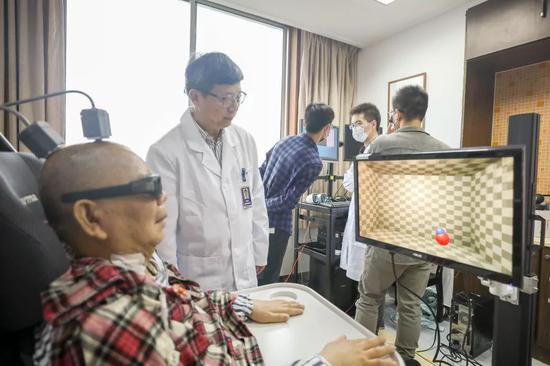 张先生在进行训练
张先生在进行训练
当然,想要达到“人机合一”的目标,并非易事。
团队采用循序渐进的训练方法,先让张先生在电脑屏幕上操控鼠标来跟踪、点击二维运动及三维虚拟现实运动中的球,再练习指挥机械臂完成上下左右等9个方向的动作,最后才是模拟握手、饮水、进食等动作。训练耗费4个多月,才有了现在这样令人激动的成果。
张先生也因此成为目前全球范围内,成功利用植入式脑机接口技术,实现肢体运动功能重建的最高龄患者。
未来已来
脑机接口的临床应用希望无限
尽管此类植入在国际上都处于试验阶段,效果也是非永久性的,但对张先生而言,脑机接口已改变他的生活,更让这类人群看到了提高生活质量的希望。
而今,张先生通过脑机接口,饿了就能吃,渴了就能喝,能够自己“做”一些事情了。工作人员得知张先生喜欢打麻将,还特地设计一套程序,让他能通过控制鼠标,玩电脑麻将游戏。“刚进病房的时候,张先生心情很低落。我们跟他说话,他都不怎么吭声。现在,他开心多了。”护士长说。
随着脑科学的不断发展,这一领域的临床应用,将从现有的以运动功能为主的功能重建,逐渐推广到语言、感觉、认知等更多更复杂的功能重建上。“大家知道,脑卒中好发于老年人,许多脑血管病患者虽经我们救治,挽回了生命,但常常遗留偏瘫、失语等后遗症。因此这次在老龄志愿者身上进行的脑机接口试验,必将对于未来的临床治疗和康复有着非常重要的指导意义。”张建民说。
王跃明说,脑机接口领域的研究需要神经科学、信息科学、机械工程和医学等多个学科的紧密合作,而浙江大学综合性大学的特征,为学科交叉提供了肥沃的土壤,“这也是浙江大学、浙大二院打造‘医学高峰’,助力我省生命健康科创高地建设的一大亮点”。


1月16日上午,浙江大学在紫金港校区召开新闻发布会,对外宣布和展示了这项重要科研成果。中国科学院院士、浙江大学医药学部主任段树民,浙大二院神经外科主任张建民,浙江大学求是高等研究院教授王跃明,浙江大学求是高等研究院教授郑筱祥及浙大二院、浙江大学脑机接口团队出席了发布会。
 脑机接口
脑机接口
所谓脑机接口,就是在大脑和假肢等外部设备之间建立一条直接传输大脑指令的通道,实现虽然存在脊髓及运动神经通路损坏,但大脑皮层功能尚健全的情况下,脑部的信号也能通过计算机解读,直接控制外部设备。
研究回顾
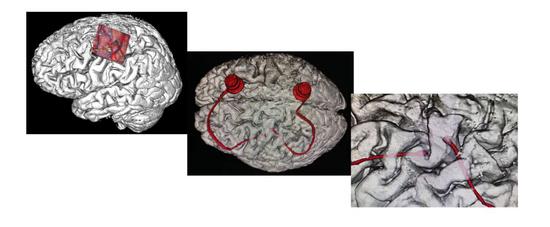
2012年,团队就在猴子脑中植入微电极阵列,运用计算机信息技术成功提取并破译了猴子大脑关于抓、勾、握、捏四种手势的神经信号,使猴子通过自身“意念”能直接控制外部机械手臂。2014年,团队又在人脑内植入皮层脑电电极,实现“意念”控制机械手完成高难度的“石头、剪刀、布”手指运动,创造了当时的国内第一。
 基于ECoG的植入式脑机接口,2014年
基于ECoG的植入式脑机接口,2014年
项目背景
该研究受到国家重点研发计划“基于脑机接口的脑血管病主动康复技术研究及应用(2017YFC1308500)”、国家重点研发计划“脑机融合的脑信息认知关键技术研究(2018YFA0701400)”、国家自然科学基金重大科研仪器研制“脑神经网络复杂系统的实时解析与调控仪器研制(31627802)”、浙江省之江实验室项目“面向运动脑机接口的脑信息解析与互适应关键技术研究”项目资助。
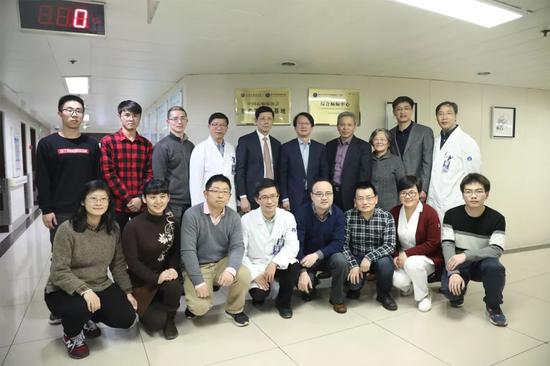
浙江大学双脑中心交叉研究团队:医学、工学、计算机科学、生物医学工程等不同学科组成的交叉研究团队
文 | 浙大二院宣传中心、浙江大学宣传部
图 | 浙大二院 宣传中心
编辑 | 浙大二院 宣传中心
()
